

Supercapacitor 건전지 팩 일관 작업 포탄 회전 강저 바다표범 어업 기계
포탄 - 회전 강저 선
장치 기능과 원리에 1.1 소개:
자동적인 일관 작업은 자동적인 포탄 지류, 자동적인 강저 롤러 및 원형 컨베이어 선으로 구성됩니다. 그(것)들의 사이에서, 자동적인 포탄 먹이는 기계는, 직경 형성하는, 알루미늄 포탄의 부정적인 전극 귀의 벌거벗은 세포, 외부 직경 자동적인 형성 측정하는, 극 접히는 귀, 자동적인 먹이고는, 부는 청소 그리고 자동적인 포탄 먹이기의 두 끝 전부에 진공 청소기로 청소의 기능을 깨닫기 위하여 사용됩니다. 자동적인 강저 회전 기계는 자동적인 윤활유 주입의 기능, 건전지의 강저 회전 및 바다표범 어업을 깨닫기 위하여 사용되고, 반지 선은 생산 라인의 각 단위에 있는 건전지의 근수 주기를 깨닫기 위하여 이용됩니다.
장비의 1.2 전반적인 외관 (그림에)
1.2.1 전반적인 크기: 길이: 4500mm x 폭: 1200mm x 고도: 1600mm;
1.2.2 외관: 압박한 underframe는 사각 통행 용접 구조를 채택하고, 위 바다표범 어업 구조는 플렉시 유리로 밀봉된 알루미늄 합금 단면도 구조를 채택합니다;
1.2.3 가동 공용영역: 각 장치는 운영하기 쉬운과 유지하게 쉬운 자주적으로 운영한 터치스크린 장비됩니다;
장비의 1.3 주요 콤포넌트
1.3.1 압축 공기를 넣은 성분: 일본의 SMC 제품;
1.3.2 전기 통제 시스템: PLC는 일본의 OMRON 제품을 채택하고, 터치스크린은 EVIEW 제품을 채택합니다;
1.3.3 선형 가이드 레일, 공 나사, 선형 방위, 등: HAIWIN 제품은 채택됩니다;
1.3.4 자동 귀환 제어 장치 모터: panasonic 제품은 이용됩니다; 댄서 모터: 일본의 산요 전기 회사의 제품 사용하기;
1.3.5 시각적인 처리 시스템: 일본의 KEYENCE 제품;
1.3.6 점용접 전력 공급: 일본의 miyaki 회사의 8000A 제품;
1.3.7 회전하는 분배자: 대만 tan 계열사의 제품은 채택됩니다;
2. 생산 라인을 위한 들어오는 물자 그리고 적당한 제품 명세서
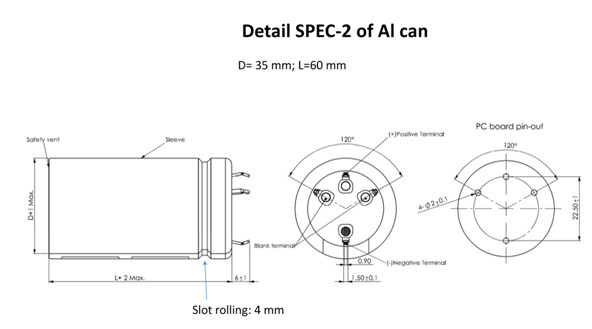
일으킬 장비가 수 있는 2.1 제품 명세서 범위: 35600의 시리즈 제품;
2.2 극지 귀 모양: 1개의 긍정적인 귀; 1개의 부정적인 전극 귀; 긍정 및 부정적인 전극 귀는 수직 국가에 건전지가 공급될 때 있어야 합니다.
2.3는 세포 직경 포용력 범위 자동적인 알루미늄 포탄 선적의 요구에 응할 수 있을 것입니다.
III. 장비의 기술적인 모수
장비 제품의 3.1 자격이 된 비율: ≥95% (기계에 기인하는 나쁜 제품 때문에)
3.2 장비 수용량/속도: 20PPM;
3.3 장비 고장 비율: ≤5% (장비에서만 기인하는 실패)
전기 3.4 장비: 전압 AC220±10%의 힘 10KW
3.5 압축공기: 0.6mpa
3.6 좋은 인간 환경 공학 성과는 기계 디자인에서 주어져야 합니다;
3.7 알루미늄, 스테인리스 또는 전기도금을 하는 것은 기계의 구조상 물자로 선호됩니다;
4, 각 기계 일 원리 및 간략한 설명
4.1 자동적인 건전지 먹이는 기계
장치 기능과 원리에 4.1.1 소개:
자동적인 건전지 먹이는 기계는 두 끝 전부에 35600의 건전지 자동적인 장악, 먼지 적출, 건전지 형성 깨닫기 위하여, 음극선 러그 포지셔닝 그리고 형성하는의 기능을 사용되는 완전히 자동적인 생산 설비, 직경 측정, 극 폴딩 러그, 알루미늄 포탄 먹이는, 알루미늄 포탄 흡수하는 먼지, 건전지 자동적인 먹이고는 및 자동적인 비우는 것은입니다.
자동적인 포탄 먹이는 기계가 완전히 자동적인 방법, 건전지를 채택하는 건전지는 전 순서 잡아당기기 벨트에서 자동적인 가져오는 로봇의 방법을 통해 워크스테이션에 움켜잡는 자동적으로 입력되고 짐은, 건전지 포탄 먹이는 사일로 겹쳐 쌓이기의 방법, 확실성의 자동적인 ID 및 네거티브를 채택합니다.
4.2.2 장비 활동 교류
정착물로 180가 자격이 없는 건전지 - positioner 교체와 2개의 극 귀 플라스틱의 조직을 고쳐 만드는 귀 부정 극 귀의 포지셔닝 제거하기 위하여 자동 자동 역에 건전지 먹이 - 채집 로봇을 가져오는 건전지를 의도하십시오 정착물을 두는 것은 건전지에 회전식 다이얼에서 자동적으로 먼지, 성형외과의 및 시험 세포 플라스틱 건전지를 만들기 위하여 직경을 추출하도록 있고 - 보내는 졸라매는 끈에 의하여 -를 건전지 가져오기의 밑에 양극 귀 - 알루미늄 포탄 자동 급식 자동적인 ID (긍정 적이고 및 음의 방향) 및 자동의 알루미늄 포탄 알루미늄 포탄 먼지 적출, 건전지, 자동적인 선적 알루미늄 포탄에 작은 다이얼 포지셔닝 정착물로 -에 자동적인 구부리는 교체 조작자 °의 자전합니다 컨베이어 선과 전기는 컨베이어 선에 따라서 afterwork 역에 수영장 수송됩니다.
주요 콤포넌트의 4.1.3 구성
전기 세포의 4.1.3.1 위탁 로봇: 4 dof 로봇은 전기 세포의 자동적인 위탁을 깨닫기 위하여 사용됩니다.
알루미늄 포탄의 4.1.3.2 자동적인 먹이는 체계: 그것은 저장통, 회전하는 공급 장치, 모터, 흡진기, 알루미늄 포탄 정면과 뒤 탐지 장치로, 건전지 알루미늄 포탄의 자동적인 먹이기 깨닫기 위하여 이용되는 등 구성됩니다.
4.1.3.3 12 역 회전식 다이얼: , 지그, 12 역 지수연동 원판, 등을 두는 모터 고정되는, 1개는 흡진기, 12 역 회전하는 분배자, 전자기 클러치로 이루어져 있어서, 각 역에 건전지 포지셔닝 및 죄고는 및 자전 전송을 깨닫기 위하여 이용됩니다.
4.1.3.4 6 역 회전식 다이얼: , 모터 고정되는, 1개는 흡진기, 6 역 회전하는 분배자로, 판, 등을 분할하는 지그를 이루어져 있어서 건전지 포탄 전송과 전지 집합을 위해 두어서, 사용됩니다.
역을 형성하는 4.1.3.5 건전지: 그것은, 및 전송선에서 건전지를 장악하고, 완화 후에 형성하고, 건전지의 외부 직경 건전지의 외부 직경을 검출하기를 위해 사용되는 검출 감지기 형성하는, 건전지를 위한 위탁 조작자로, 죄는 손 등 구성됩니다.
부정적인 전극 귀의 4.1.3.6 포지셔닝 역: 그것은 전기 세포의 부정적인 전극 귀의 포지셔닝을 깨닫기 위하여 이용되는 부정적인 전극 귀, 등의 자동적인 자전 장치 그리고 위치 탐지 기계장치로 구성됩니다.
역을 형성하는 4.1.3.7 부정적인 귀: 그것은 각각 2개의 부정적인 귀 형성을 위해 사용되는 탐지 감지기 구성됩니다, 및 죄는 형성 기계장치로.
부정적인 러그의 4.1.3.8 자동적인 구부리는 역: 그것은 부정적인 러그의 자동적인 구부리기 깨닫기 위하여 이용되는 부정적인 러그의 전기 세포 포지셔닝 기계장치 그리고 2개의 자동적인 구부리는 기계장치로 구성됩니다.
전기 세포의 4.1.3.9 충전소: 그것은 전기 세포의 알루미늄 포탄 포지셔닝 기계장치, 자동적인 위탁 기계장치, 탐지 감지기, 전기 세포의 자동적인 위탁을 깨닫기 위하여 이용되는 등으로 구성됩니다.
4.1.3.10 건전지 회전하는 출력 역: 그것은 자전 조작자, 알루미늄 포탄으로 적재 후에 입에서 튀겨질 전지를 깨닫고 원형 운반 선의 건전지 기초로 바닥에 수직으로 끼워넣기 위하여 이용되는 등 장악으로 구성됩니다.
4.3 자동적인 구멍 회전 기계
장치 기능과 원리에 4.3.1 소개:
이 자동적인 강저 회전 기계는 35600 원통 모양 건전지의 자동적인 강저 회전을 깨닫기 위하여 사용되는 완전히 자동적인 생산 설비입니다. 강저의 차원 정밀도는 다음과 같이 입니다 (당 아)의 실제적인 건전지 포탄 그리고 모자에 따라 변경되고 조정될 수 있습니다:
목록 구멍 크기
회전식 다이얼 포지셔닝 정착물로 가져오는 교체 조작자 건전지를 통해서 수송 선으로 건전지의 기초로, (2개 아)는 뒤에 오는 일에 각 위치를 위해, 분할 원판 행해집니다: 세포벽 코팅에 있는 어떠한 파손, 단락, 자동적인 탐지, 자동적인 절단, 등라도 있는지 보기 위하여 강저 알루미늄 포탄을 구르 후에 건전지 포탄 자동적인 주입, 자동적인 목록 강저, 진공은 먼지와 탐지를 위로 빱니다. 회전 강저가 완료된 후에, 건전지는 반지 컨베이어 선과 함께 수송되고, 건전지는 기초에게서 수동으로 밖으로 가지고 가고 자전 디스크로 끼워넣습니다.
4.3.2 장치 활동 교류
바퀴에 컨베이어 선으로 포좌 건전지로 세포벽 코팅에 회전하는 조작자 건전지 가져오 그리고 안 바퀴 포지셔닝 정착물 2를 (1) - > 자동적인 탐지와 건전지 포탄 살포 유무 건전지 - 자동적인 목록 강저 - 흡수하는 먼지와 건전지 포탄에 의하여 끊긴 진공 시험을 진공 청소기로 청소하십시오 - > 건전지 단락 시험, 자동적인 비우는 먹이거든.
주요 콤포넌트의 4.3.3 구성
4.3.3.1 6 역 회전식 다이얼: 그것은 다이얼, 각 역에 건전지의 포지셔닝 및 죄 및 자전 전송을 깨닫기 위하여 이용되는 등을 분할하는 모터, 흡진기, 6 역 회전하는 분배자, 전자기 클러치, 포지셔닝 지그 및 6 역으로 구성됩니다.
위 (더 낮은) 먹이는 조작자를 자전하는 4.3.3.2: 그것은 자전 기계장치, 위와 더 낮은 이동하는 기계장치, 압축 공기를 넣은 손가락, 건전지 포지셔닝 정착물, 탐지 감지기, 운반 선에서 강저 회전 기계에 건전지의 자동적인 먹이고 출력을 깨닫기 위하여 이용되는 등 보답하는 2 위치로 180° 구성됩니다.
4.3.3.3 건전지 선적 탐지와 자동적인 기름 주입 역: 탐지 감지기, 자동적인 기름 주입 장치, 조정 부류, 회전 강저 도중 건전지 포탄에 호브의 마찰을 감소시키는 건전지 포탄의 표면에 아무 건전지 선적 그리고 윤활유 주입나 있는지 검사를 위해 사용되는 등으로 구성됩니다.
4.3.3.4 자동적인 회전 강저 역: 그것은 건전지 탄력 있는 밀어올리는 기계장치로 구성되, 기계장치, 인도 굴대의 자전 공구 머리, 캠 유형 공급 장치를 두고 건전지의 자동적인 회전 강저를 깨닫는 기계장치를 위로 누르.
4.3.3.5 진공 흡입 먼지와 알루미늄은 손상 탐지 역을 벗깁니다: 그것은 운동 기계장치 왔다갔다, 진공 흡입 기계장치, 진공 탐지 기계장치, 건전지의 안 벽에서 먼지 적출을 위해 알루미늄 포탄 손상의 강저 그리고 탐지를 구르기 후에 사용되는 등으로 구성됩니다.
4.3.3.6 절연 시험 역: 그것은 동의 조사 왔다갔다, 탐지 감지기, 절연 시험기, 등으로 구성됩니다.
4.3.3.7 자동적인 접착제로 붙이는 위치: 그것은 up-down 동의 기계장치로, 자전 동의 기계장치 및 건전지의 안 벽의 자동적인 접착제로 붙이기 깨닫기 위하여 이용되는 접착제로 붙이는 체계, 등 구성됩니다.
4.4 고리 모양 컨베이어 선
이 전송선은 (포좌에 설치되는) 생산 라인의 각 역에서 건전지의 순환을 깨닫기 위하여 이용됩니다. 대응 역은 정지 정지 기계장치와 공급 장치로 갖춰집니다. 회전 강저에 의해 완료된 건전지는 먹이는 조작자를 통해서 회전율 쟁반으로 적재됩니다.
5: 장비 일반적인 윤곽 및 기준
5.1 장치 색깔: 색깔 널은 통용할 것입니다
기계, 장비 ≤ 80db의 소음의 외벽에서 5.2 측정 10MM
5.3는 당 a.의 안전 부호에 의해 요구된 국가의 관련된 기계 적이고 및 전기 장비의 안전 표준에 장비 및 모든 안전 표준 및 필요조건 따릅니다.
5.4 중국 사람 조작 설명서와 장비 유지 설명서는 붙어 있습니다.
5.5 구매된 부속의 전기 통제 도표, 압축 공기를 넣은 통제 도표, 명세, 기계의 원시 코드 및 다른 물자는 무작위로 전달될 것입니다.
5.6는 다양성의 보충을 각종 부속의 명부 그리고 그림을 판매인 구매자에게 제공할 것입니다.
5.7 착용 부품은 장비에 붙어 있습니다:
5.8는 비난받기 쉬운 부분의 명부를, 단위의 이름, 수, 명세, 모형 또는 그림의 생활 견적된과 다른 정보 상표를 포함하여 제공합니다.
VI. 장비 운영 환경 필요조건
장비의 6.1 무게: 600Kg에 관하여; 장비 크기: 길이 × 폭 × 고도 = 2100mm×1300mm×1540mm;
6.2. 주위 온도: 당 a 작업장의 환경에 의해 결정하는;
6.3는 전력 공급을 통제합니다: 단 하나 단계 220V, 50HZ의 5KVA 전압 변동 범위: + 10%-10%;
6.4. 압축공기: 말리기 후에, 여과와 압력 안정화: 출구 압력은 5.0kg/cm2 보다는 더 중대합니다;
6.5는 위치에 공기가 방해받지 않는다는 것을 a를 보증할 것입니다 파티를 열;
1. 새로운 장비 약속
우리의 회사는 고객에게 제공된 상품이 아주 새롭고, 완전한 사용되지 않는 장비이다는 것을 보장합니다.
2. 기밀성 투입
우리의 회사는 어떤 당도, 다른 당의 관련 그림, 기술 정보, 사업 정보와 다른 사업 비밀 및 기술적인 비밀의 서면 허가 없이 어떤 식으로든 제3자에 새면 안된다고 약속합니다.
3. 판매 후 서비스 투입
(1) 장비의 선적의 날짜에서 2 달, 당 B는 1 년 안에 적시와 자유로운 보장에 있는 비인간적인 결함에 책임 있습니다 (장비가 잘못되 때, 판매 후 서비스 직원은 통보를 받기 후에 2 시간 안에 반응할 것입니다. 상황에 따르면, 인원은 48 시간 안에 제자리에 있어야 합니다. 아니 60 이후 시간, 생산의 계속성을 구매자 에의한 지키기 위하여;
(2) 장비 후에 문제가 있는 경우에 보증 기간을, 2개의 정당 교통하고 취급합니다 그것을 통과했습니다. 필요하다면, 판매 후 인원은 그것을 고치기 위하여 보내지고, 비용만 위탁될 것입니다. Zh
(3) 2개의 정당에 의해 계약 및 기술적인 계약에서 규정된 보증 기간 도중, 회사는 우리의 제품의 정상적인 사용 도중 인간적인 손상에 기인하지 않는 질 문제를 보장을 제공할 것입니다.













