

1, 유동적 주입은 간략하게 기계화합니다
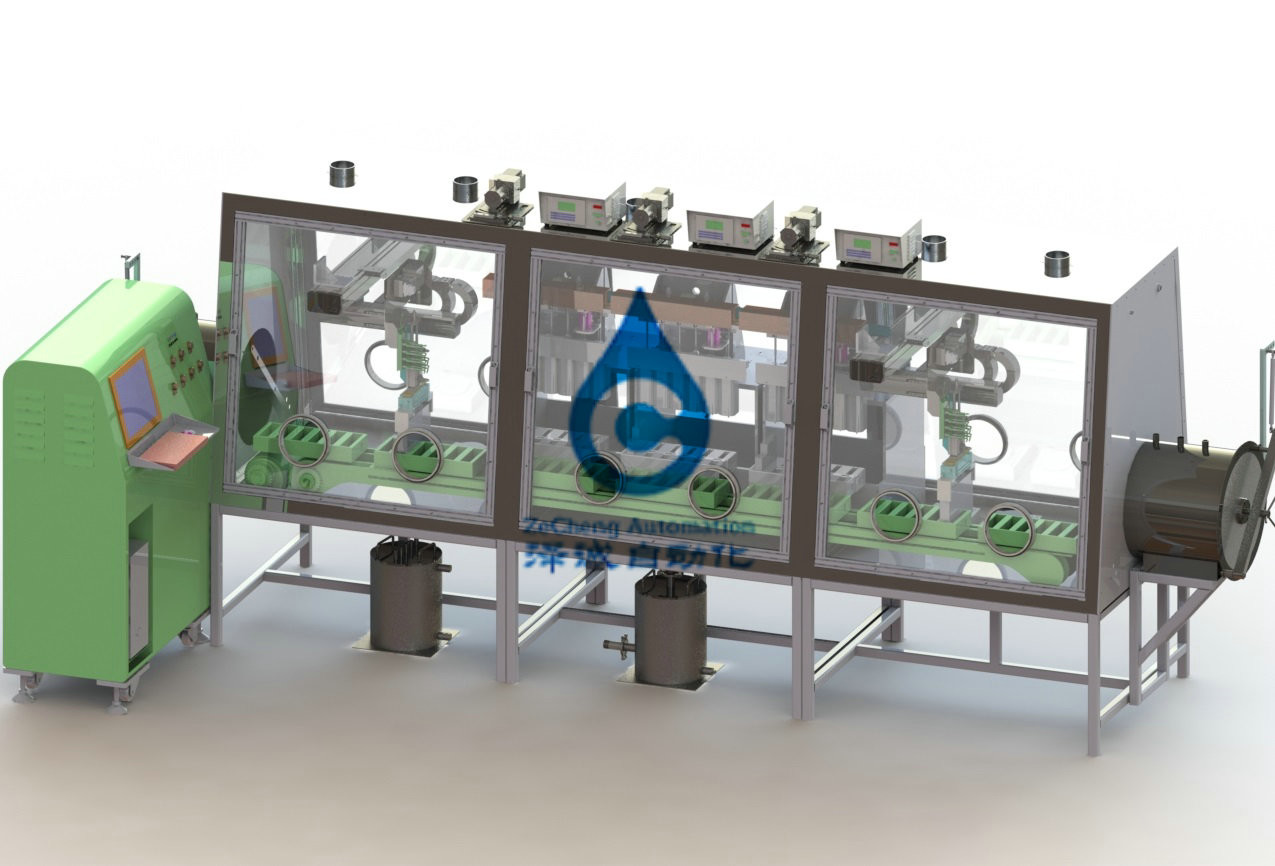
이 장비는 글로브 상자 또는 마른 주사 용액에 철강 배터리 외피에 적합하고 인공 주사 코드, 자동 평량, 자동적 주입 유동체, 자동 진공이 입지, 자동 평량, 자동 블랭킹, 글로브 상자의 인공 재수화 공정 또는 배터리의 자동화 설비의 일괄생산을 위한 건조 룸을 허용한다는 것을 깨닫습니다.
2. 설계 요구 사항
2.1. 배터리의 크기에 적합합니다 : 길이에서 240 밀리미터, 폭에서 110 밀리미터와 두께에서 40 밀리미터.
![]()
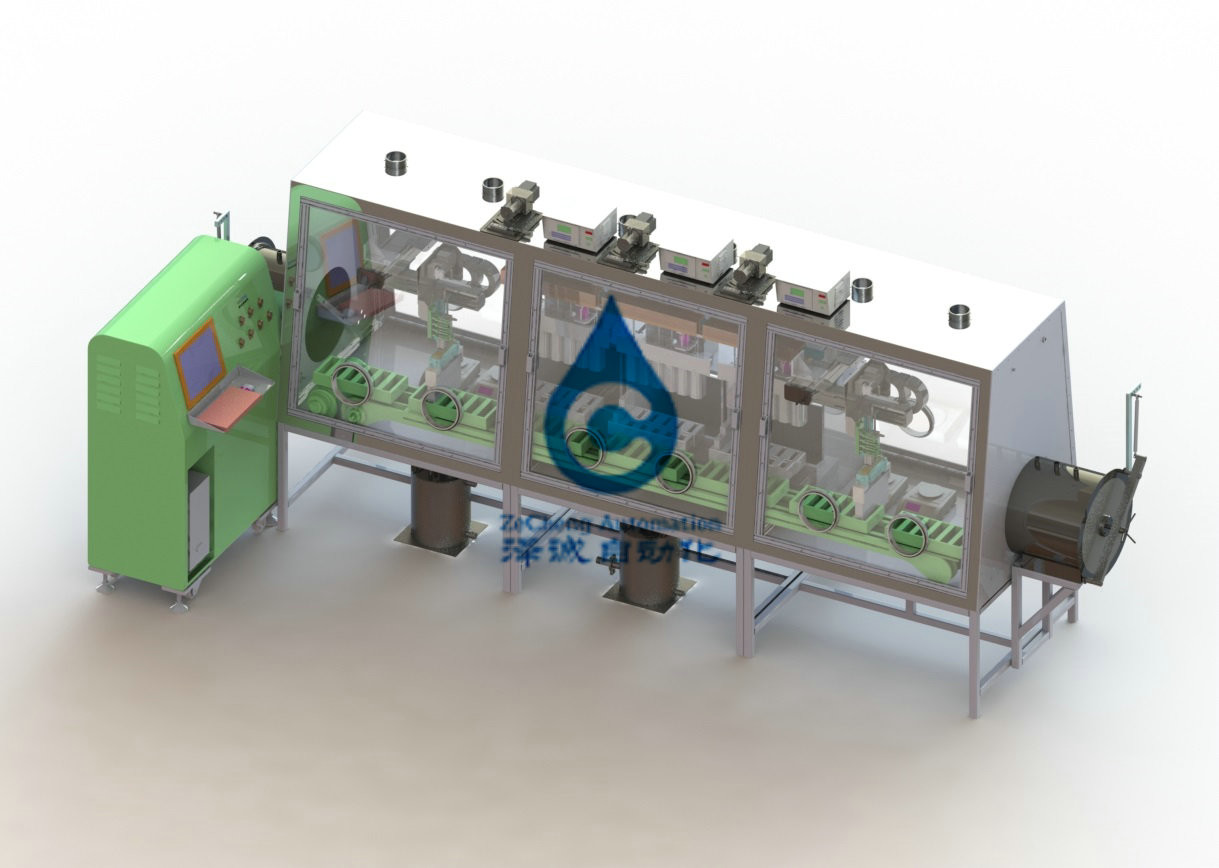
2.2. 샘플은 액체로 먼저 진공기기로 청소되고 그리고 나서 도입되는 후, 유동적 한 번으로 도입하고 그리고 나서 진공과 압력이 교대로 주입 뒤에 위치됩니다. 흡수 일관성은 좋고, 균일성이 좋고, 효율이 높고, 정확성이 높으며,와 운영이 편리하고 믿을 만합니다.
2.3. 절차를 퍼부으세요 : 코드 - > 배터리 액체 주입 자동 평량 액체를 쓸도록 이전인 액체 주입 트레이로의 인공 놓여진 배터리 - 센서 자동 검출 액체 주입 위치, 서보 모터에 대한 인젝션 위치 로의 액체 트레이 자동 전송은 주사 용액 헤드 이동을 운전하고 - 자동 진공, 충전기, 입지 흡수 (액체 주입 방송국) - 자동적으로 유동적 위치 유동 - 자동 평량 (자격이 없는 배터리 인공 재수화) - 자동 블랭킹 - 인공 패킹 씰 뒤에 있는 주사 용액으로부터 > 기록 액체 트레이를 허용합니다.
2.4. 자동 액체 주입 : 2 유동적 주입 펌프.
2.4.1. 서 있는 것 : 압력과 저진공 교호하세요.
2.4.2. 자동 다운포스 : 분사 노즐로부터 배터리를 분리합니다.
2.4.3. 브라켓을 제거하고, 새로운 채워지지 않는 브라켓을 쓰고, 항목 7 내지 11의 동작 흐름을 반복하세요.액체 충전 배터리 브라켓은 앞으로 이동됩니다 ;
2.4.4. 다시 중요시 되세요.배터리 브라켓은 벨트 비를 당기는 것 뒤에 레바이크하링 정거장에 이동하고, 부호 읽기장치가 브라켓의 바코드를 읽고, 동시에 중량 감지기에 대한 매니퓰레이터무브 4 배터리가 중요시 되고 바코드와 무게를 단 데이터를 컴퓨터로 해석합니다.컴퓨터는 배터리 오토마틱앨리디 인젝션 부피를 산정하고, 인젝션 부피가 자격을 얻는다는 것을 통보합니다, NG이 즉각적 알람과 자동적으로 배제된 NG 배터리를 가지고 있을 것입니다, 매뉴얼 인리무브 배수 배터리.
2.4.5 브라켓이 비의 풀 벨트 입의 좌단부에 도달할 때, 방전용 조종자는 배터리를 일 그룹의 다음 과정의 장치로 옮길 것입니다 ;비어 있는 브라켓 풀 벨트 A와 브라켓에 조종자 1에 의해 옮겨지는 것은 역류된 왼쪽 방법과 권리에 의해 ;한 당기기 밴드의 좌측 단부에, 조종자 2 큰 비어 있는 브라켓은 밴드 비를 당기기 위해 옮겨집니다.
2.4.6 진공 시간과 타임 스탠딩은 상황에 따라 설정될 수 있습니다. 서 있는 압력 또는 대기 지위는 선택될 수 있습니다
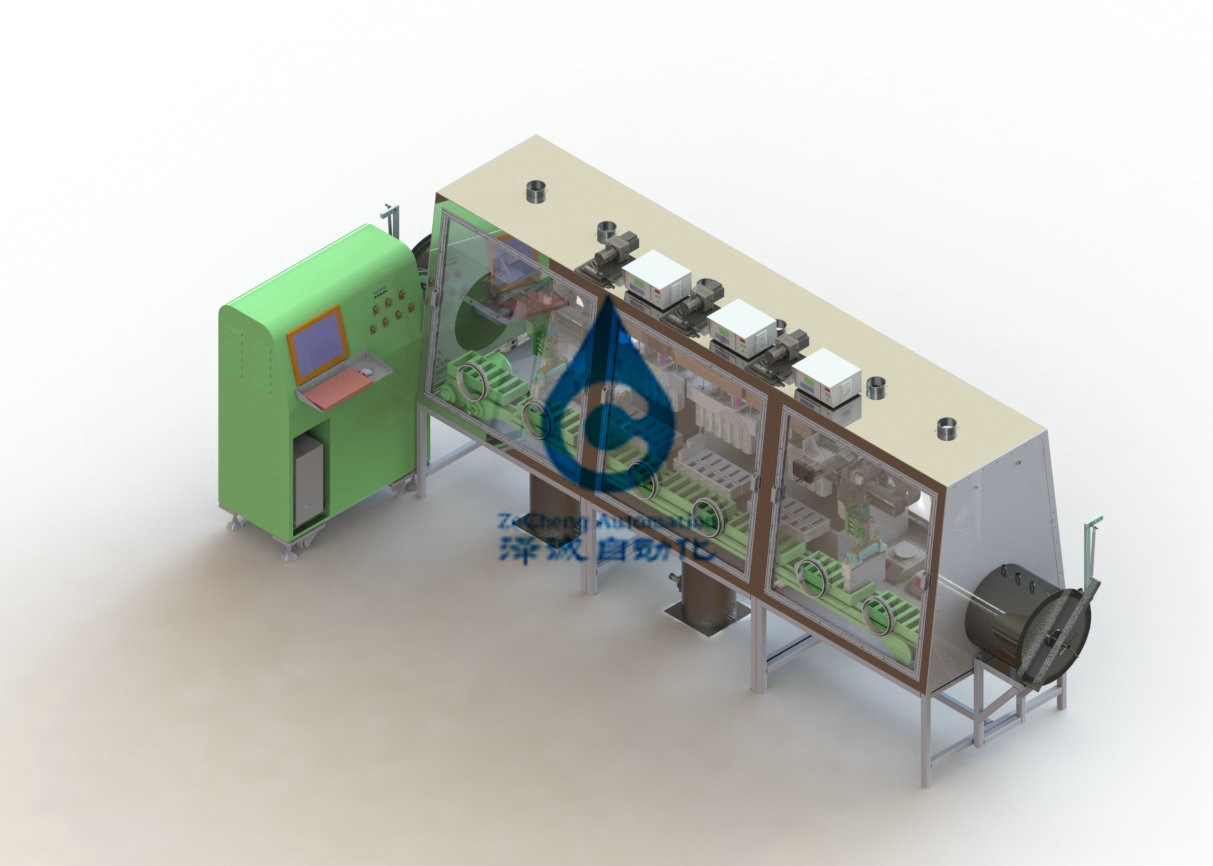
2.5. 자동 평량과 풀링 시스템 : 당기고 당기는 자동 브라켓 흐름, 매뉴얼 바 코드 스캐닝, 컴퓨터와 데이터 자동 처리를 심사숙고한 자동 배터리 칭량, 데이터베이스, NG 알람과 다른 기능.
4, 장비 기술적인 매개 변수
|
상술 항목 |
ZDAE07C |
| 에프피에스 | 1PPM |
| 정확성 인젝션 유체 | ±1% 내에 |
| 입지 시간을 허용합시다 | 14 분에 따른 지컬레이트. |
| 생산량 | 한 주입의 자격 있는 비율은 > 99%와 자격이 없는 배터리 USES 설명서 충전 해결책입니다. |
| 액체 주입 비율 | 0~500mladjustable |
| 힘 | 2KW |
| 전자 스케일의 정확성 | 이르세요 : 4Kg, 정확도 ±0.1g. |
| 봉합 | 유동적 인젝션국은 실링 상태에 있고 공백이 -95kpa로 펌프질 되며, 그것이 20 분 동안 유지될 수 있습니다) |
| 윤곽치수 | 4000*1900*1800 |
![]()
![]()













